Competition Name: Running Straight
Submitted By: Gary Reynolds, Physics Instructor at Santa Ana High School, Santa Ana, CA
Materials:
- Boe-Bot, Shield-Bot, or a similar robot that does not use encoders on its wheels
- 36-inch long 1×6” or 2×6” Board (can use tape on the floor or a wall instead)
- 2 (two) small plastic cones (can use cardboard tubes instead)
Objective:
Your robot must drive as straight as possible and stop at the board. This is a test of how well you can tune your robot’s servo/drive motors.
Rules:
About the Robots:
- Because this game tests participant’s ability to carefully program the servos or drive motors on their robots, the robots in this game must have:
- Independently programmable drive motors or servos
- No wheel or motor encoders
- Collision detection that causes them to stop when the end of the course is reached.
- A mark is placed on the center front of the robot to clearly show the score it receives when it reached the wall at the end of the course
About the Course/Field:
- The course consists of a flat floor or table space that is at least 6 ft. long by 3 ft. wide
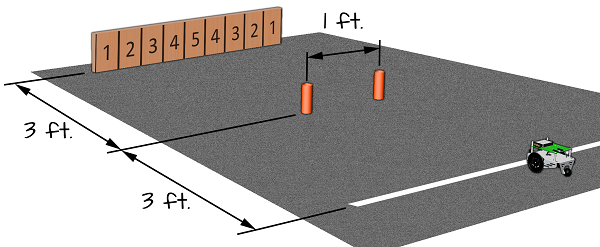
- A 3 ft. board is marked with 9 (nine) 4-inch wide boxes and labeled as shown in the drawing below. The center box is labeled with a “5”.
- Tape or similar labeling can be used on a wall or on the floor instead of a board.
- Two cones are placed 1 ft. apart in the center of the course for the robot to travel through on its way to the board at the end of the course.
- Cardboard tubes could be used instead of cones
About the Game:
- Upon turning on the robot, it should try to drive in a straight line through the cones and stop at the board at the end of the course.
- It should be decided ahead of the time if the competition will be:
- A single run for each robot,
- Multiple runs with an average or total score,
- Or multiple runs with the best score
Scoring:
- 5 pts.: passing through the cones without hitting them
- 1-5 pts.: score from hitting the board at the end of the course
Variations:
When the robot touches the board at the end, it could be programmed to turn around and come back through the cones