Contest Name: Wall-to-Wall
Submitted By: Gary Reynolds, Physics Instructor at Santa Ana High School, Santa Ana, CA
Materials:
- Boe-Bot, Shield-Bot, ActivityBot or Similar Robot
- 2 (two) 36-inch long 1×6” or 2×6” Boards (or similarly sized hard object. A wall could be used instead of one of the boards.)
- Masking tape
Objective:
The objective is to drive from one wall to the other and touch the highest-scoring spots to accumulate as many points as possible within 60 seconds from the start.
Rules:
About the Robots:
- A mark is made on the front of the robot
- Because this game tests participant’s ability to carefully program a sequence of movements, the robots in this game must be similarly matched in capability – wheel encoders should either be required for all robots or not allowed for any, and their top speeds should be similar.
- For a more exact approach to robots with varying speeds (to remove the speed advantage):
- Robots are initially timed through a 3 foot straight course.
- Robot with the slowest speed is given a scoring period of 60 seconds in the box.
- Faster robots are given a shorter period of time (percentage of 60 seconds) based on their speed run compared to the slowest robot’s time in the speed trial.
- For a more exact approach to robots with varying speeds (to remove the speed advantage):
About the course/field:
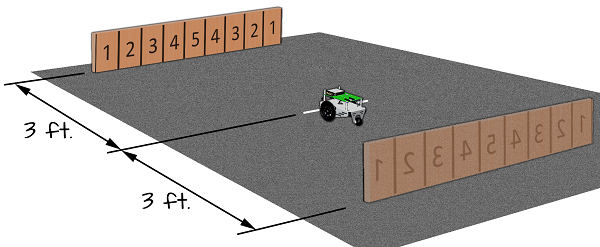
- The course consists of a flat floor or table space that is at least 6 ft. long by 3 ft. wide
- 2 (two) 3 ft. boards, spaced 6 ft. apart, are marked with 9 (nine) 4-inch wide boxes and labeled as shown in the drawing below. The center box is labeled with a “5”.
- Tape or similar labeling can be used on a wall or on the floor instead of a board.
- A small piece of masking tape is placed halfway between the boards to mark the start of the course.
- The robot starts behind this line.
About the Game:
- This competition tests a robot’s response to touch sensors and ability to make accurate turns.
Scoring:
- The robot scores the sum of values of the sections of board it strikes with the center mark within a 60 second period.
Variations:
- The size of the field, the time limit, and the scoring marks can be varied.
- Additional requirements for programming can be imposed to increase the difficulty.
- Other sensors, such as the PING))) or infrared sensors could be used, and a line near the boards to indicate that the robot got “close enough” before turning around could be added.