This project demonstrates how a cyber:bot can roam around and avoid objects on the right, front and left of the chassis using the Ping))) Ultrasonic Sensor and Mounting Bracket Kit. A Ping))) Ultrasonic Sensor mounted on a servo can measure distances at any interval across a 180 degree radius. This technique can be used to travel down a narrow hallway or maze, staying centered in the corridor. You may also program the cyber:bot to never get stuck since it can easily detect obstacles on the sides.
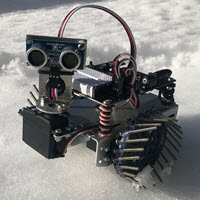
Cyber:bots are made to be modified! What if your cyber:bot could be outfitted with wheel traction devices to travel on snow, ice, and pine needles? We hot-glued some screws to the perimeter of the wheel to test this concept. The video and short instructions are the last page of this tutorial.

Before You Start
This project assumes you already have some experience with the cyber:bot tutorial series. At a minimum, work through these first:
- Prerequisite(s):
- Get Started with micro:bit and Python
- Writing micro:bit Programs
- Add Modules to Your micro:bit
(From the Adding a Module to the micro:bit Filesystem heading to the end of the page. Make sure to watch the video too.)
- Main Lessons:
What’s Needed
- (1) – Fully assembled and tested cyber:bot (#32700)
- (1) – PING))) Ultrasonic Sensor + Mounting Bracket, (#910-28015a)
- (1) Optional wheel traction devices of your own concept
Any hardware (screws, locknuts, etc) we use either comes from our cyber:bot kit, the Ping))) Ultrasonic Sensor + Mounting Bracket kit, or can be easily found at any local hardware store. We typically use #4-40 screw sizes.
