Activity 4: Connect Servo Motors and Batteries
From the robot navigation standpoint, continuous rotation servos offer a great combination of simplicity, usefulness and low price. The Parallax continuous rotation servos are the motors that will make the BOE Shield-Bot’s wheels turn, under Arduino control.
In this activity, you will connect your servos to the Board of Education Shield’s servo ports, which will connect them to supply voltage, ground, and a signal pin. You will also connect a battery supply to your Arduino because, under certain conditions, servos can end up demanding more current than a USB supply is designed to deliver.
Standard Servos vs. Continuous Rotation Servos
Standard servos are designed to receive electronic signals that tell them what position to hold. These servos control the positions of radio controlled airplane flaps, boat rudders, and car steering. Continuous rotation servos receive the same electronic signals, but instead turn at certain speeds and directions. Continuous rotation servos are handy for controlling wheels and pulleys.
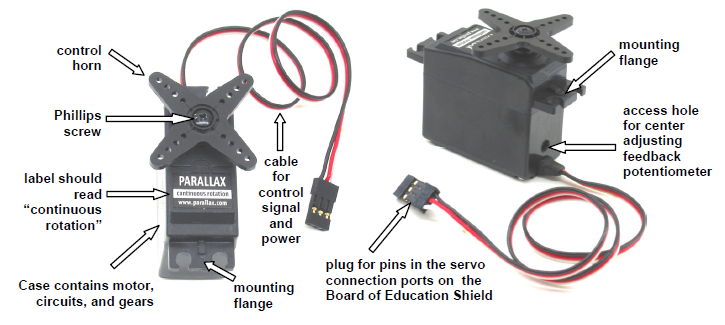
Servo Control Horn, 4-point Star vs. Round
It doesn’t make a difference. So long as it is labeled “continuous rotation” it’s the servo for your BOE Shield-Bot. You’ll remove the control horn and replace it with a wheel.