What it’s about
When facing an opponent in the sumo ring, your SumoBot WX will have to execute a variety of maneuvers. Examples include:
- Scanning for an opponent by moving and turning in different directions so the sensors can see as much as possible
- Detecting the edge of the ring and turning away from it
- Turning toward and rushing at an opponent to push it out of the ring
Before practicing maneuvers, this tutorial starts with a one-time adjustment to make the SumoBot’s servos stay still when your program tells them to. The adjustment is called “centering” the servos, and without it, they might turn slowly instead of staying still. Next, you will write programs to test and verify that each servo responds correctly to blocks that set speed and direction.
After centering and testing, you will create programs that make the SumoBot perform a variety of maneuvers. This will provide some good practice since your own custom maneuvers might just give you an edge over your opponent.
Before you start
You will need:
- A computer with a USB 2.0 compatible port and Chrome browser
- USB A to micro-B cable
- A SumoBot WX, built up at least through the end of the Build your SumoBot WX pages
- Parallax Screwdriver
- 4 AA batteries in the SumoBot WX robot’s battery pack
- 1.2V Tenergy NiMH rechargeable batteries, recommended for the longest run time
— or — - 1.5 V Alkaline batteries, about 30 minutes run time
- 1.2V Tenergy NiMH rechargeable batteries, recommended for the longest run time
After you finish
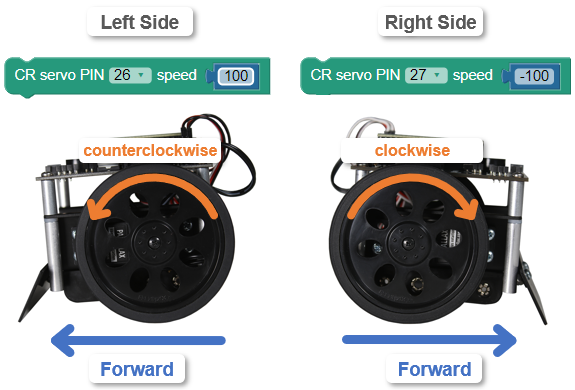
You will understand how to control the wheel speeds and directions to create maneuvers for forward, backward, and variations on turning that include in-place, pivot, and curve. You will also be able to adjust maneuver times and speeds to adjust distance traveled and angle turned. With this, you will be ready to move on to the tutorial where you build, test, and navigate wtih QTIs. In that tutorial, you will program the SumoBot to cross the sumo ring, detect the edge, and execute a maneuver to turn away from the edge and go in a new direction.
